Betere controle van robot op afstand
Sommige plekken zijn levensgevaarlijk of moeilijk te bereiken, maar toch wil je hier de kennis en vaardigheden van mensen kunnen gebruiken. Het project ‘Predictive Avatar Control and Feedback’ (PACOF) richt zich op een robotsysteem dat de bestuurder van een robot het gevoel geeft op de plek van de robot te zijn. Drie onderzoekers uit de drie verschillende disciplines van de faculteit EEMCS van de Universiteit Twente werken samen binnen dit project.
AVATARS
De zogenaamde Avatars waar Dr. Ir. Douwe Dresscher, Dr. Felix Schwenninger, en Dr. Ir. Gwenn Englebienne aan werken, hebben wat weg van de blauwe mensachtigen uit de gelijknamige film. “In plaats van deze fictieve personages werken wij aan eenzelfde soort besturingssysteem die de bestuurder het gevoel moet geven dat hij of zij de plek van de robot inneemt”, vertelt Dresscher.
In Noorwegen worden al robots voor in de thuiszorg ontwikkeld, maar die zijn nog niet zo persoonlijk als zouden kunnen zijn. In het dunbevolkte land kunnen de Avatars uitkomst brengen om de enorme afstanden in het land te overbruggen doordat verzorgers in de huid van de robots kruipen. Ook voor gevaarlijke toepassingen – zoals bij het (ont)laden van olietankers in de haven van Rotterdam – komen de Avatars goed van pas. “Bij het werken met gevaarlijke stoffen wordt om de expertise van operators gevraagd. Met behulp van een Avatar kun je de benodigde vaardigheden naar de olietanker krijgen zonder mensen in gevaar te brengen”, aldus Dresscher.
DE WERKING
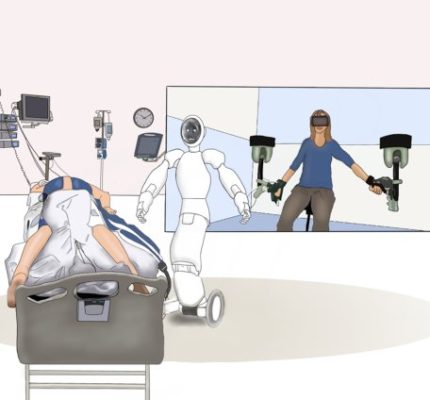
Om dit voor elkaar te krijgen moeten er drie dingen gebeuren. Allereerst moeten de bestuurders volledig worden afgesloten van de buitenwereld. Daarnaast moeten de bestuurders realistische stimuli krijgen om een virtuele wereld te creëren. “Dit gaat niet alleen om beeld van een VR bril en geluid, maar ook om bijvoorbeeld geur, temperatuur en een tegendruk als je ergens tegenaan drukt”, vertelt Dresscher. “We willen dat de operator het idee heeft ergens anders te zijn, diegene moet het gevoel hebben dat de robot zijn of haar eigen lichaam is.” Als laatste moet de besturing intuïtief en nagenoeg gelijk zijn aan de beweging die de avatar moet maken.
VERTRAGING
Dat laatste is de uitdaging waar de onderzoekers aan gaan werken in het project PACOF. “De bestuurder kunnen we robotarmen geven die ze kunnen besturen, maar als de bestuurder dan een beweging maakt, duurt het door vertragingen in het netwerk even voordat de robot die beweging ook maakt”, aldus Dresscher. Ook als de robot de bestuurder feedback geeft, gebeurt dit met vertraging. Dit maakt de besturing van zo’n systeem moeizaam en dat beperkt de mogelijkheden.
TOEKOMST VOORSPELLEN
De vertraging kan worden opgelost door de robot te laten voorspellen wat de bestuurder gaat doen. Door de robot zo te modelleren, kan hij de beweging al maken voordat hij de beweging doorkrijgt van de bestuurder. “Aan de andere kant gaan we ook proberen te voorspellen hoe de omgeving van de robot reageert. Dit gebruiken we in de feedback naar de operator zodat die niets merkt van de vertraging. Dit betekent ook dat we moeten bedenken wat er gebeurt als de robot een foute voorspelling maakt. Hoe lost de robot dat op en wat voor feedback ontvangt de bestuurder?”, aldus Dresscher.
DISCIPLINES KOMEN SAMEN
Dit vier jaar durende project wordt gefinancierd door de faculteit EEMCS van de UT. Er worden drie promovendi aangesteld op dit project. Tijdens deze zogenaamde ‘theme call’ projecten worden verschillende disciplines van de faculteit, zoals wiskunde, informatica en sensornetwerken, actief samengebracht. Dresscher houdt zich bezig met de verbinding tussen operator en avatar, Schwenninger richt zich op de wiskundige modellen en Englebienne onderzoekt het voorspellen van het gedrag van de operator.
Dresscher: “Dit is een unieke kans om nu eens nauwer samen te werken met collega’s binnen mijn eigen faculteit. In projectaanvragen werk je normaal gesproken veelal met collega’s van buiten je eigen faculteit of universiteit. Ik kende Felix al een beetje vanuit het onderwijs, Gwen kende ik nog niet. We leren veel van elkaar en vormen nu al een goed team. We krijgen vrijheid en middelen van het faculteitsbestuur en halen het beste in onszelf naar boven.”
Dit artikel is een ingezonden bericht en valt buiten de verantwoordelijkheid van de redactie.